





























|
Кількість
|
Вартість
|
||
|
|
|||
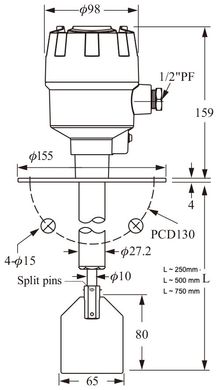
Принцип роботиротаційних лопатевих датчиків рівня SE-120 FineTekз закритим валом (трубним подовженням дуже простий) – зазвичай датчик встановлюють в стінці бункера для контролю верхнього, середнього або нижнього рівнів. У вільному режимі (при відсутності контрольованого матеріалу) синхронний двигун обертає лопать датчика зі швидкістю приблизно 1 оборот в хвилину. Коли навколо лопаті з'являється матеріал, що перешкоджає обертанню, двигун зупиняється, викликаючи зміну стану мікроперемикача (формує сигнал індикації або управління). Застосовуються для вимірювання рівня практично будь-яких сипучих матеріалів: зерно, комбікорм (в тому числі гранульований), борошно, добрива, фураж, цемент, пластик і т.д.
Технічні характеристики

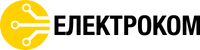
Габаритні розміри
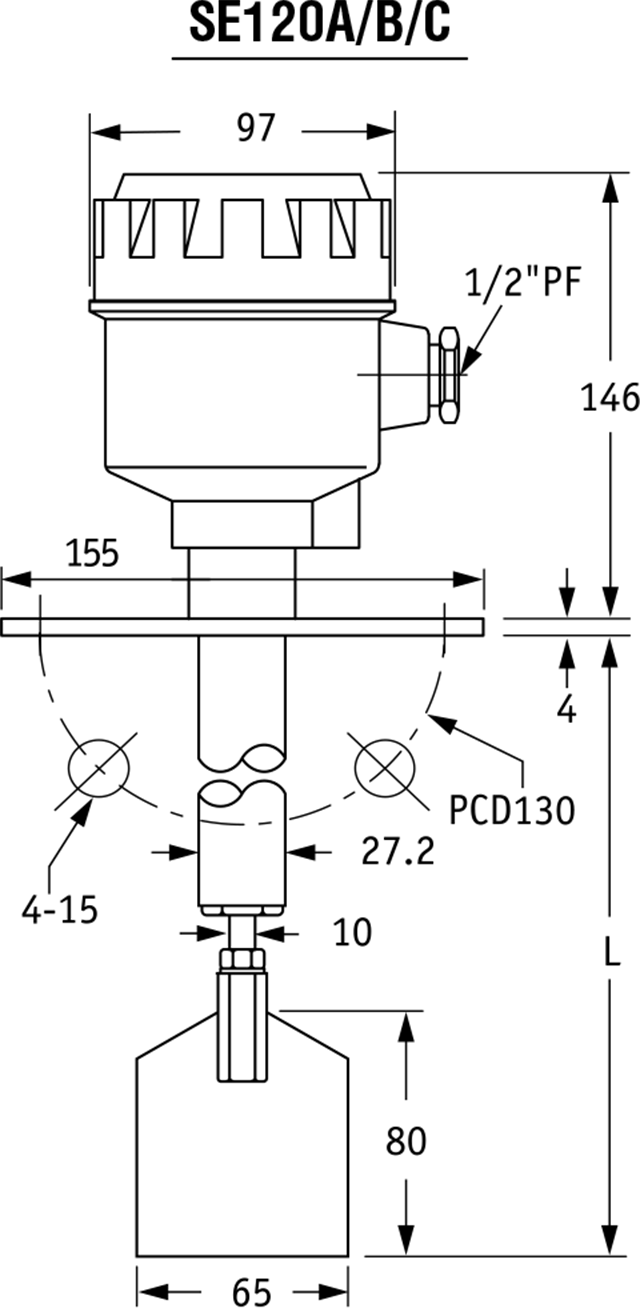
- Горизонтальна/вертикальна установка
- Темп. (-10° С ~ +70° C)
- Секція від фланця до лопаті виготовлена з SUS 304
- Стандартний вага
L ~ 250mm – 2,2 кг
L ~ 500 mm – 2,5 кг
L ~ 750 mm – 2,8 кг - Стандартна довжина робиться відповідно до замовлення
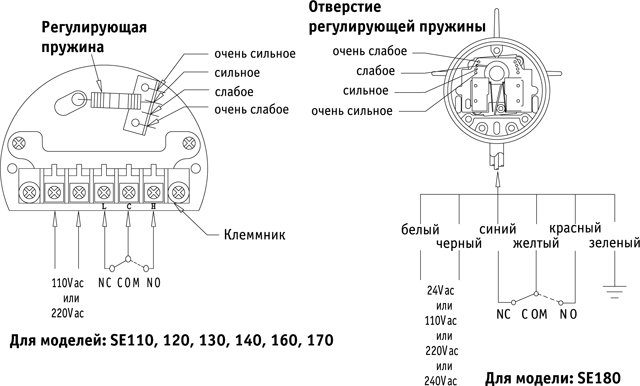
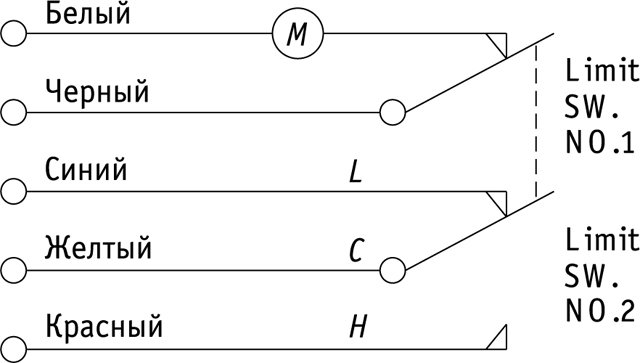
Принцип дії керуючого мікроперемикача
- При відсутності матеріалу синхронний двигун обертається. Клеми L і C замкнуті, Н і С розімкнуті.
- Коли матеріал гальмує лопать, двигун зупиняється, клеми L і C розмикаються, клеми Н і С замикаються.
- Після сходу матеріалу лопать вивільняється, двигун знову починає обертатися, клеми L і C замикаються, клеми Н і С розмикаються.
Механізм регулювання зусилля на валу
Регулювання здійснюється перевстановлення пружини в одне з чотирьох положень: дуже сильне (натяг), сильне, слабке, дуже слабке. Заводська установка— пружина в слабкому натягу. Для збільшення чутливості (матеріали з більш низькою питомою вагою) перемикайте пружину в більш слабке натяг і, навпаки, для зменшення чутливості збільшуйте натяг пружини. Чи не блокуйте регулюючу пружину— це може зіпсувати прилад!